 Dataset for Offline Safe RL: A benchmark
Dataset for Offline Safe RL: A benchmarkAbstract
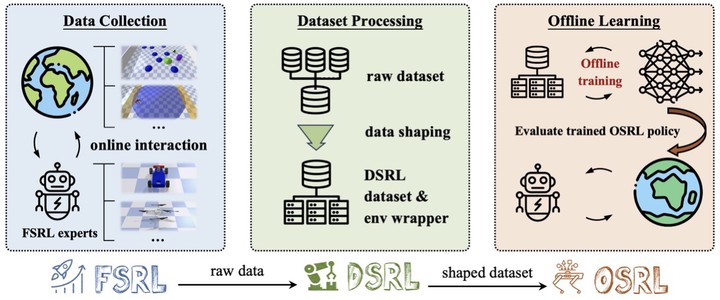
This paper presents a comprehensive benchmarking suite tailored to offline safe reinforcement learning (RL) challenges, aiming to foster progress in the development and evaluation of safe learning algorithms in both the training and deployment phases. Our benchmark suite contains three packages, 1) expertly crafted safe policies, 2) D4RL-styled datasets along with environment wrappers, and 3) high-quality offline safe RL baseline implementations. We feature a methodical data collection pipeline powered by advanced safe RL algorithms, which facilitates the generation of diverse datasets across 38 popular safe RL tasks, from robot control to autonomous driving. We further introduce an array of data post-processing filters, capable of modifying each dataset’s diversity, thereby simulating various data collection conditions. Additionally, we provide elegant and extensible implementations of prevalent offline safe RL algorithms to accelerate research in this area. Through extensive experiments with over 50000 CPU and 800 GPU hours of computations, we evaluate and compare the performance of these baseline algorithms on the collected datasets, offering insights into their strengths, limitations, and potential areas of improvement. Our benchmarking framework serves as a valuable resource for researchers and practitioners, facilitating the development of more robust and reliable offline safe RL solutions in safety-critical applications.
Supplementary notes can be added here, including code and math.