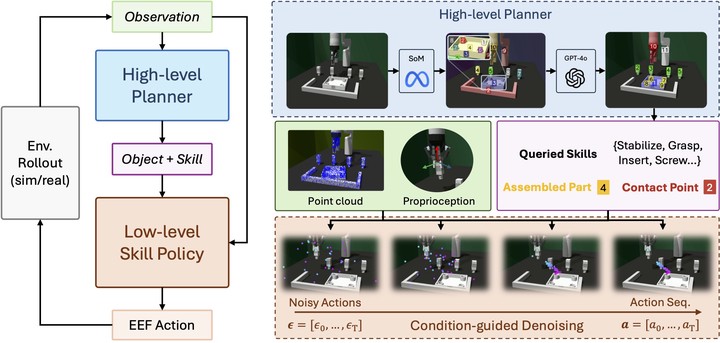
 Framework for the proposed Query-Centric Diffusion Policy
Framework for the proposed Query-Centric Diffusion PolicyAbstract
The robotic assembly task poses a key challenge in building generalist robots due to the intrinsic complexity of part interactions and the sensitivity to noise perturbations in contact-rich settings. The assembly agent is typically designed in a hierarchical manner, i.e. high-level multi-part reasoning and lowlevel precise control. However, implementing such a hierarchical policy is challenging in practice due to the mismatch between high-level skill queries and low-level execution. To address this, we propose the Query-centric Diffusion Policy (QDP), a hierarchical framework that bridges high-level planning and low-level control by utilizing queries comprising objects, contact points, and skill information. QDP introduces a querycentric mechanism that identifies task-relevant components and uses them to guide low-level policies, leveraging point cloud observations to improve the policy’s robustness. We conduct comprehensive experiments on the FurnitureBench in both simulation and real-world settings, demonstrating improved performance in skill precision and long-horizon success rate. In the challenging insertion and screwing tasks, QDP improves the skill-wise success rate by over 50% compared to baselines without structured queries.
Supplementary notes can be added here, including code and math.